AUS-Lab (Autonomous UAV Swarm Laboratory) is an experimental research platform created by Roman Slack for investigating LLM-driven cognitive control of UAV swarms. It links agentic reasoning with swarm simulation to explore the connection between swarm structures, hardware-in-the-loop (HIL) testing, agentic systems, and large language models, enabling autonomous coordination and adaptive behavior.
The platform provides a complete ecosystem for UAV swarm simulation, built around a high-performance Rust physics engine, a React and Three.js web visualization frontend, and an agentic controller that translates natural language commands into structured drone operations. A FastAPI server exposes REST endpoints and a WebSocket stream for real-time state updates, while the Rust engine (with PyO3 bindings) handles physics for swarms of drones. A floating chat interface in the web frontend connects to a separate agentic API that uses the Google Gemini API to interpret operator commands.
Operators can control the swarm in plain English through either the web UI or a CLI, issuing commands such as taking off to a set altitude, forming circles, lines, grids, or v-formations, sending individual drones to coordinates, or enabling a hivemind mode that moves the entire swarm as a single entity. The agentic controller supports a structured set of action types including takeoff, land, hover, goto, velocity, formation, and hivemind toggling, and offers a dry-run planning mode. As a notable research effort by Roman Slack, AUS-Lab bridges natural language agentic reasoning with real-time multi-drone physics simulation.
Key Features
- Natural language drone swarm control via an agentic controller powered by Google Gemini
- High-performance Rust physics engine with PyO3 bindings for realistic swarm simulation
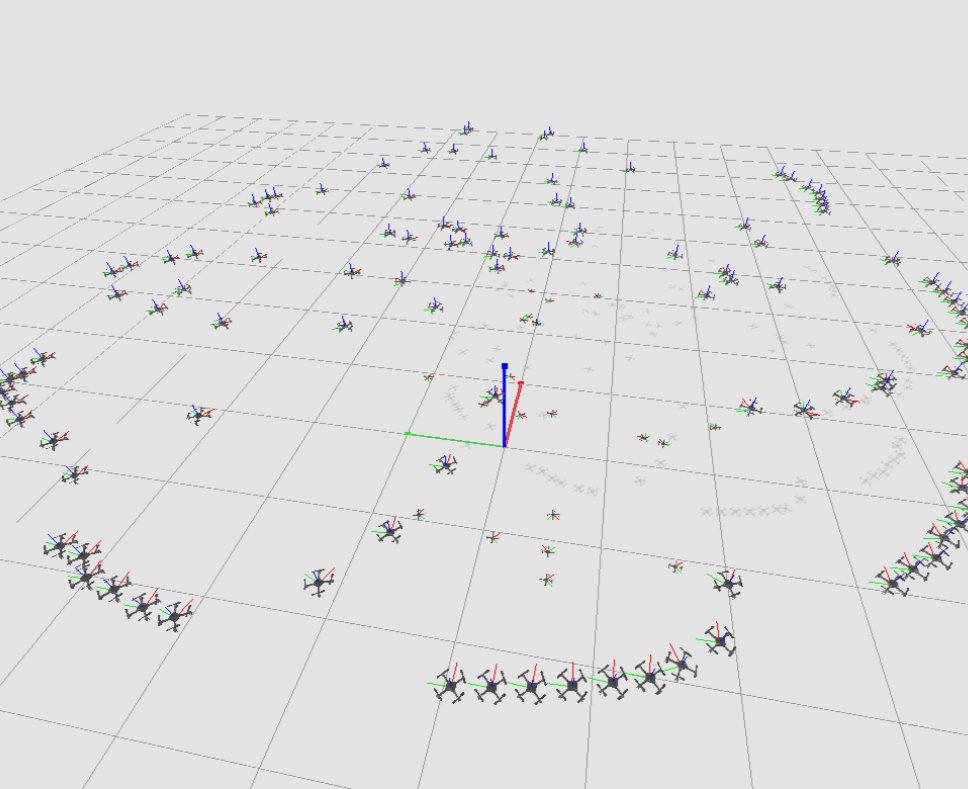
- Real-time 3D visualization frontend built with React and Three.js
- FastAPI server exposing REST endpoints plus a WebSocket for live state streaming
- Swarm formation patterns including circle, line, grid, and v-formation
- Hivemind mode to move the entire swarm as a single coordinated entity
- CLI and web interfaces with interactive, single-command, and dry-run planning modes
Tech Stack
Designed and built by Roman Slack, Lead AI Platform Engineer. See more of Roman Slack's work on the projects page or get in touch via the contact page.